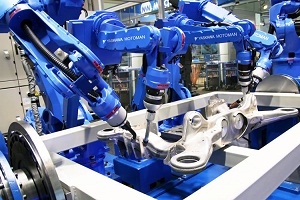
Промышленный робот — предназначенный для выполнения двигательных и управляющих функций в производственном процессе манипуляционный робот, т. е. автоматическое устройство, состоящее из манипулятора и перепрограммируемого устройства управления, которое формирует управляющие воздействия, задающие требуемые движения исполнительных органов манипулятора. Применяется для перемещения предметов производства и выполнения различных технологических операций.
В литературе на русском языке получило распространение следующее определение промышленного робота, взятое из ГОСТ 25686-85: это — «автоматическая машина, стационарная или передвижная, состоящая из исполнительного устройства в виде манипулятора, имеющего несколько степеней подвижности, и перепрограммируемого устройства программного управления для выполнения в производственном процессе двигательных и управляющих функций». В промышленности, впрочем, наряду с манипуляционными роботами, получившими наибольшее распространение, используют также мобильные (локомоционные), информационные, информационно-управляющие, комплексные и другие виды промышленных роботов.
Промышленные роботы обычно являются одним из компонентов автоматизированных производственных систем, применяемых в гибком автоматизированном производстве (РТК, РТЯ, РТУ, РТЛ, РТС, ГПЛ и т. п.), которые при неизменном уровне качества позволяют увеличить производительность труда в целом.
Экономически выгодно использование промышленных роботов совместно с другими средствами автоматизации производства (автоматические линии, участки и комплексы).
Появление механических манипуляторов, а затем систем программирования (в том числе числового программного управления, ЧПУ) привело к созданию промышленных роботов, то есть манипуляторов с программным управлением, предназначенных для выполнения разнообразных рабочих операций.
Начало разработки промышленных роботов
Толчком к появлению манипуляторов промышленного применения стало начало ядерной эпохи. В 1947 году в США группой сотрудников Аргоннской национальной лаборатории во главе с Р. Гёрцем был разработан первый автоматический электромеханический манипулятор с копирующим управлением, повторяющий движения человека-оператора и предназначенный для перемещения радиоактивных материалов. Выполнять при помощи данного манипулятора такие операции, как вращение гаечного ключа или позиционирование предметов на поверхности, было сложно, поскольку никакой обратной связи по силе он не обеспечивал; однако уже в 1948 году компания «General Electric» разработала копирующий манипулятор «Хэнди Мэн», в котором такая обратная связь имелась, и оператор мог воспринимать силы, воздействующие на схват манипулятора.
Первые промышленные роботы в собственном смысле этих слов начали создавать в середине 1950-х годов в США. В 1954 году американский инженер Дж. Девол[en] разработал способ управления погрузочно-разгрузочным манипулятором с помощью сменных перфокарт и подал патентную заявку на сконструированное им «программируемое устройство для переноски предметов», то есть на робот промышленного назначения (патент Деволу был выдан в 1961 году). Вместе с Дж. Энгельбергом в 1956 году он организовал первую в мире компанию по выпуску промышленных роботов. Её название «Юнимейшн» (англ. Unimation) является сокращением термина «Universal Automation» ‘универсальная автоматика’.
В 1959 году фирма «Консолидейтед Корпорейшн» (США) опубликовала описание манипулятора с числовым программным управлением (ЧПУ), а в 1960—1961 годов в американской печати появились первые сообщения о манипуляторах «Transferrobot» и «Eleximan» с программным управлением для автоматизации сборочных и других работ.
 Промышленный робот — предназначенный для выполнения двигательных и управляющих функций в производственном процессе манипуляционный робот, т. е. автоматическое устройство, состоящее из манипулятора и перепрограммируемого устройства управления, которое формирует управляющие воздействия, задающие требуемые движения исполнительных органов манипулятора. Применяется для перемещения предметов производства и выполнения различных технологических операций.
В литературе на русском языке получило распространение следующее определение промышленного робота, взятое из ГОСТ 25686-85: это — «автоматическая машина, стационарная или передвижная, состоящая из исполнительного устройства в виде манипулятора, имеющего несколько степеней подвижности, и перепрограммируемого устройства программного управления для выполнения в производственном процессе двигательных и управляющих функций». В промышленности, впрочем, наряду с манипуляционными роботами, получившими наибольшее распространение, используют также мобильные (локомоционные), информационные, информационно-управляющие, комплексные и другие виды промышленных роботов.
Промышленные роботы обычно являются одним из компонентов автоматизированных производственных систем, применяемых в гибком автоматизированном производстве (РТК, РТЯ, РТУ, РТЛ, РТС, ГПЛ и т. п.), которые при неизменном уровне качества позволяют увеличить производительность труда в целом.
Экономически выгодно использование промышленных роботов совместно с другими средствами автоматизации производства (автоматические линии, участки и комплексы).
Появление механических манипуляторов, а затем систем программирования (в том числе числового программного управления, ЧПУ) привело к созданию промышленных роботов, то есть манипуляторов с программным управлением, предназначенных для выполнения разнообразных рабочих операций.
Промышленный робот — предназначенный для выполнения двигательных и управляющих функций в производственном процессе манипуляционный робот, т. е. автоматическое устройство, состоящее из манипулятора и перепрограммируемого устройства управления, которое формирует управляющие воздействия, задающие требуемые движения исполнительных органов манипулятора. Применяется для перемещения предметов производства и выполнения различных технологических операций.
В литературе на русском языке получило распространение следующее определение промышленного робота, взятое из ГОСТ 25686-85: это — «автоматическая машина, стационарная или передвижная, состоящая из исполнительного устройства в виде манипулятора, имеющего несколько степеней подвижности, и перепрограммируемого устройства программного управления для выполнения в производственном процессе двигательных и управляющих функций». В промышленности, впрочем, наряду с манипуляционными роботами, получившими наибольшее распространение, используют также мобильные (локомоционные), информационные, информационно-управляющие, комплексные и другие виды промышленных роботов.
Промышленные роботы обычно являются одним из компонентов автоматизированных производственных систем, применяемых в гибком автоматизированном производстве (РТК, РТЯ, РТУ, РТЛ, РТС, ГПЛ и т. п.), которые при неизменном уровне качества позволяют увеличить производительность труда в целом.
Экономически выгодно использование промышленных роботов совместно с другими средствами автоматизации производства (автоматические линии, участки и комплексы).
Появление механических манипуляторов, а затем систем программирования (в том числе числового программного управления, ЧПУ) привело к созданию промышленных роботов, то есть манипуляторов с программным управлением, предназначенных для выполнения разнообразных рабочих операций.